3.9.2.1 Alarm Monitor
An
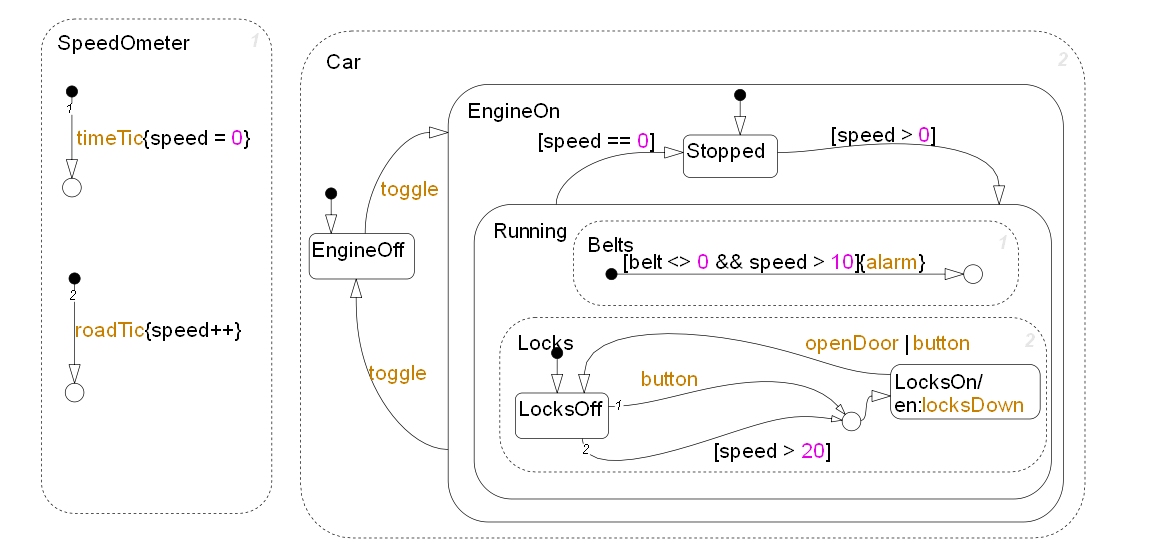
alarm controller system is designed to fulfill two functions: one is to
lock car doors when speed exceeds 20, and the other is to turn on an alarm when
speed is larger than 10 while the seat belt is not worn. The following Stateflow
diagram modeling this alarm monitor system consists of two parallel
states, state SpeedOmeter updating variable speed based on events
timeTic and roadTic, and state Car specifying the dynamic
behavior of the monitor. A driver can toggle engine between on and off. When the
engine turns on (in state EngineOn), initially the monitor is at state
Stopped. Once speed is greater than 0, the monitor becomes active by
entering state Running that contains two parallel substates:
state Belts can raise an alarm based on the belt status and speed when it
is activated, and state Locks deals with the lock of doors. Note that all
events guarding transitions are inputs from environment (for instance, event
toggle is decided by a driver).
Our PAT
model that is automatically generated is available here. The model preserves the hierarchical structure and
captures the complex execution order of the diagram. We
add six assertions to this PAT model; these assertions specify the
desired properties of the alarm monitor system such as whether car speed
can exceed 20. Besides assertions, we also tune the PAT model for
the efficiency during verification. To be specific, we constrain the speed
value from 0 to 21, and the value of belt to be 0 or 1. An
auxiliary variable EngineOn_Entry indicates the complete
of the entry action of state EngineOn. The fine-tuned
PAT model is avialable here. Using the
PAT model checker, we can exhaustively examine all possible situations that the
alarm monitor system may encounter. Furthermore the verification process is
fully automated. With the help of PAT, we found that this alarm monitor
system failed to satisfy the desired properties that are denoted by
the following assertions.
|
//engineOn => (speed > 20
=> locksDown)
#define goal2
!(Car_EngineOn_Status == active && EngineOn_Entry == 1)
|| !(speed >
20)
||
(Car_EngineOn_Running_Locks_LocksOn_Status ==
active);
#assert Stateflow() |= []
goal2;
//engineOn => ((speed > 10
&& belt <> 0) => alarm = 1)
#define
goal3 !(Car_EngineOn_Status == active && EngineOn_Entry == 1)
|| !(speed > 1 && belt == notoccurred)
|| (Car_EngineON_Running_Belts_Status ==
active);
#assert Stateflow() |= []
goal3; |
For
example, the first property (goal2) requires the door must be locked when the
engine is on and the speed exceeds 20. The counterexample that is automatically
generated by PAT demonstrates the following scenario: a car's speed reaches
beyond 20 when its engine is off (for example, the car moves on a slope), when
the driver toggles the engine from off to on, the default sub-state
Stopped is entered, and therefore the event locksDown is not able
to be generated. To fix the problem, we adopt the solution proposed by Scaife et
al., which is to add conditions when entering default states. Reusing the
previous example, the default transition to state Stopped is guarded by
condition [speed = 0] and another condition [speed > 0] is
added to guard a new default transition to state Running. Similarly, the
default transition to state LocksOff is constrained by condition
[speed <= 20] while condition [speed > 20] is inserted to
guard a new default transition to state LocksOn.
Copyright © 2007-2012 Semantic Engineering Pte. Ltd.